윈도우와 마찬가지로, 리눅스도 하나의 운영체제이다. OS (Operating System)
운영체제는 컴퓨터 장치인 Hardware 와 내부 Software사이에서 자원을 골구로, 효과적으로 사용할 수 있도록 도와준다.
운영체제가 없다면, 간단한 기능 구현도 모두 디지털회로로 만들어야 할 것이다.
Hardware(H/W) 장치로는 CPU, Memory, RAM, Disk 등이 있다.
이중 OS는 Disk에 저장되게 된다. 윈도우의 C드라이브와 비슷한 계념이지만, 리눅스는 비슷하면서 다르다.
즉, 물리적으로 분리되어있는 드라이브 (만약 드라이브가 3개면 윈도우는 C: D: E: 으로 잡힐 수 있다.)
리눅스는 윈도우와 달리 물리적으로 분리되어 있는 자원도 유연하게 논리적 자원으로 합치거나 분리가 쉽다.
Mount (마운트) : Hardware device 와 Software directory(Kernel)를 붙여주는 작업을 마운트라고 한다.
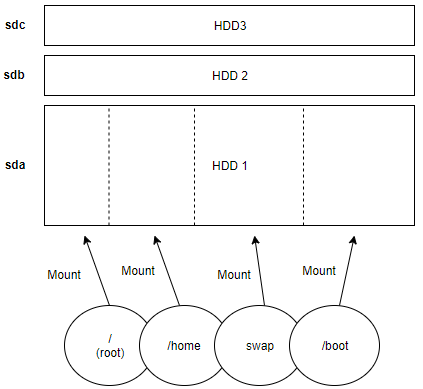
아래 예를 들면, 3개의 Hard Disk가 있다고 가정한다. Linux는 저 HDD 3개의 공간을 필요한 만큼 할당해서 사용할 수 있다. 그러나, 이 경우 1개의 HDD만 사용한다고 가정하고, 아래 점선과 같이 사용할 공간을 마련하여 그곳에 Mount 작업을 한다.
이 Mount 작업을 해야 리눅의 파일디렉터리 구조에 등록이 되는 것이다.
즉 / (root) 아래 파일구조들이 만들어 지는 것이다. 그 공간 할당은 사용자가 필요한 만큼 자유롭게 할당 할 수 있다.
리눅스에서는 물리적인 Hard Disk를 sda, sdb, sdc ... 이렇게 디폴트로 등록이 된다. 즉 윈도우의 C: D: E: 같은 느낌으로 보면 된다. 그러나 그 물리적인 공간도 sda가 더 가져갈 수도 있고 할당을 자유롭게 할 수 있다.
그리고 그 Hard Disk 에서 파티셔닝(Partitioning)을 하게 되는데,
즉 할당할 구역을 나누는 작업을 하면, sda1 sda2 sda3 ... 이라는 이름으로 등록이 된다.
이렇게 파티셔닝으로 나눠진 공간을 "PV (Physical Volume)" 이라고 한다.
즉 물리적으로 내부에 선을 긋고 완전히 다른 공간으로 쓰겠다고 나눴기 때문에 이후에 확장 및 축소 작업은 어려울 것이다. 특히 root 공간은 시스템을 멈추고 하는 등 어려운 작업하게 직면할 수도 있다.
그래서 이에 대안으로 "LV (Logical Volume)"이 등장했다.
즉 물리적인 공간을 크게 할당하고, 그 내부에서 논리적으로 선을 긋고, 필요시 지우고 다시 늘리고 줄이고 하는 작업을 편하게 만드는 방법이다.
아래 그림에서는, 하드웨어 공간에 딱 2개만 mount를 했다. /boot의 경우, 딱 한정된 용량 내에서 부팅만을 하기위한 공간이므로 sda1으로 일부분만 할당을 했고, 나머지 공간은 자유자재로 변경할 수 있도록 Volume Group(VG) 라는 이름으로 mount를 했다.
VG(Volume Group)이란, LV를 논리적으로 자유롭게 쓰고 지울 수 있는 공간을 만드는 것이다. 논리적 즉, 간단한 커맨드 라인으로 디렉터리를 만들고 지우고를 자유롭게 할 수 있어 관리가 아주 용이하게 된다.
그래서 아래에는 딱 2개 포인트만 mount를 진행했다. /(root) 와 /home 그리고 swap은 VG 내부에서 서로 영역을 나눠쓸 수 있다.
PV (Physical Volume은 마치 매직으로 선을 긋고 지우기 위해서는 많은 수고가 들지만,
LV(Logical Volume)은 마치 연필로 경계선을 긋고 지우개로 지울 수 있는 구조라고 보면된다.
CentOS를 설치하면서 OS자원할당 개념이 나오게 되는데, 어느정도 개념을 잡고 공간을 필요한 만큼 할당하면 도움이 될 것이다.
The difference being that if you wish to change the track thickness and spacing as the differential pair changes layers in the PCB to control impedance then they should be defined as a Physical Cset. If the track thickness and gap remains the same throughout the cross section of the PCB then it is recommended that the differential pair be defined as an Electrical Cset.
For Constraint Regions the differential pairs MUST be defined as a Physical Cset.
Uncoupled length and static phase must be defined as an Electrical Cset, so you may find you have both an Electrical Cset and a Physical Cset to control the differential pairs.
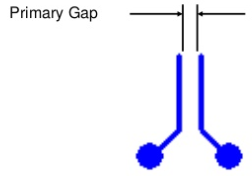
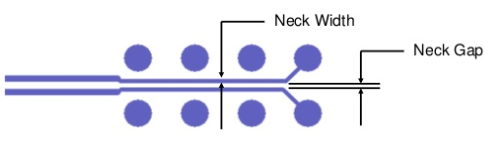
You will see the values for Min Line Spacing, Primary Gap, Primary Width, Neck Gap, Neck Width, + and - Tolerance will be inherited from the Physical / Electrical domains depending on how they are defined.
Trace 두께, 사이간격이 전체가 일정할 때
=> Elecrical Cset을 설정
임피던스를 조절하기 위해 DiFF pair Route의 두께나 Gap이 달라지거나, Layer가 바뀌는 경우,
Constraint Region을 사용하여 Route의 두께가 달라질 수 밖에 없는 경우,
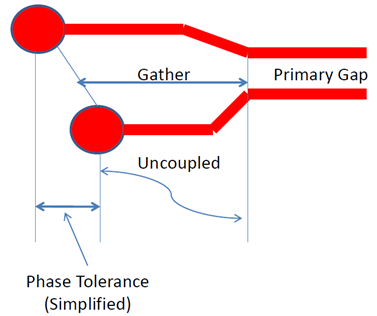
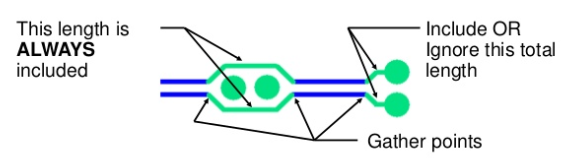
* Uncoupled Length : 커플링 되지 않는 구간의 길이 의미. differential pair는 모든 길이가 coupling되어야 하는데, 시작부나 중간에 장애물이 나왔을 때, 동일하게 갈 수 없게 되는데, 그 길이의 길이를 제한.
* Gather Control : Max uncoupled length 계산시, pin에서 Gather Point까지 etch length길이로 칠지 말지 결정.
* Static Phase Tolerance : differential nets의 두 Net (A, B) 간의 허용하는 길이 차. 값이 -1일 경우 길이차를 확인하지 않음. (differntial 신호는 위상이 상반된 신호가 동시에 출발하는데, 이 신호의 위상이 다르면 Common mode가 발생하는데, 그 tolerance를 정함)
=============================================
버전 OrCAD PCB Std 17.2
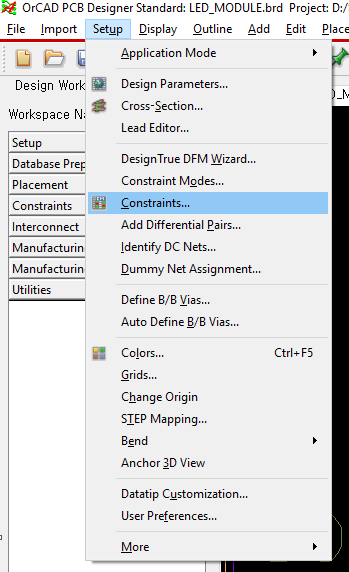
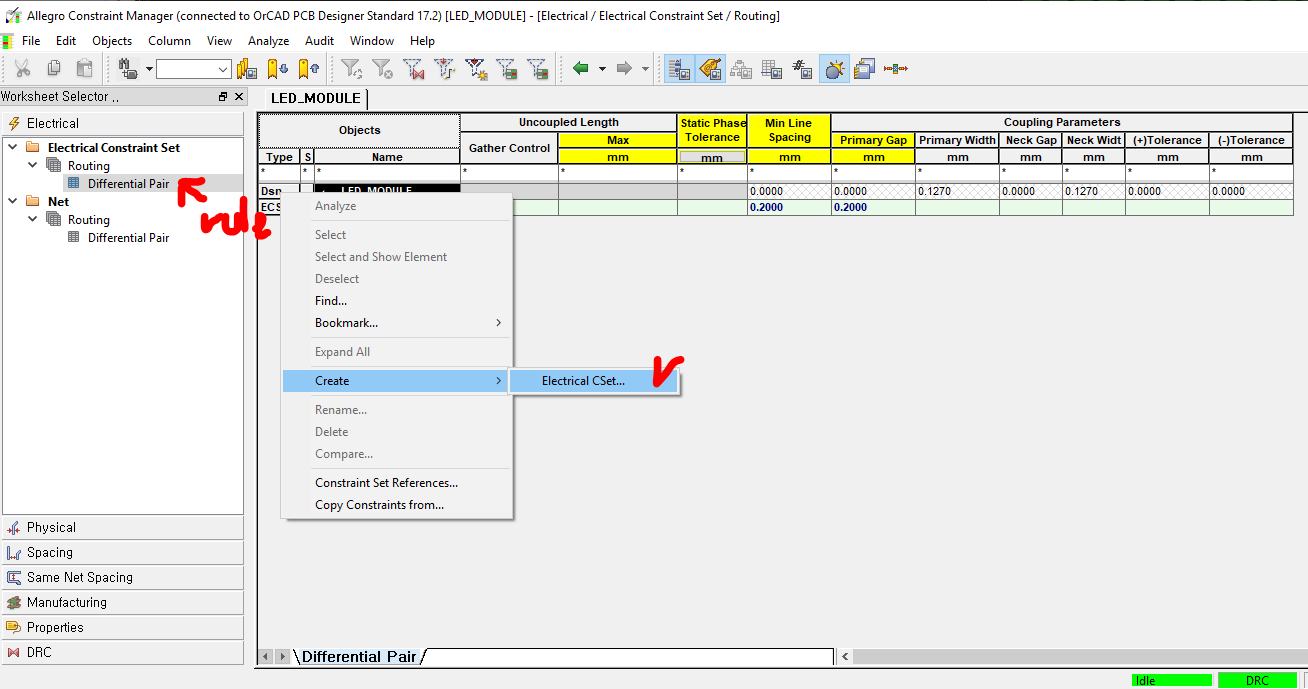
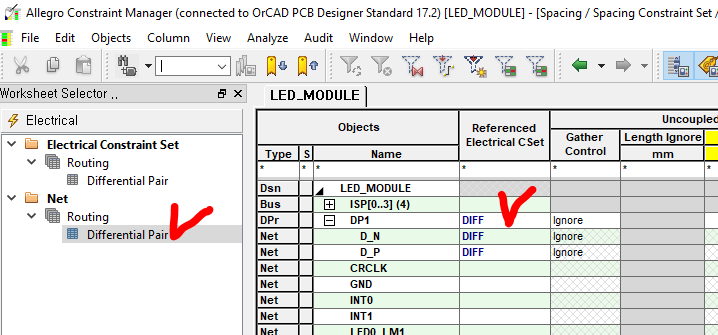
설계 규칙을 위한 Rule을 만들어 주기 위해 CM Rule - 맨처음 Electrical tap의 Routing - Differential Pair 의 새로운 Set속성을 만들어 준다.
**중요** Net - Routing - Differential Pair의 "Referenced Electrical CSet"을 위에 만든 DIFF로 지정해 주어야, Set에서 설정한 값이 Net에 고스란히 반영된다. (Set로 지정되면, 위 Set에서 설정한 값들이 그데로 적용됨)
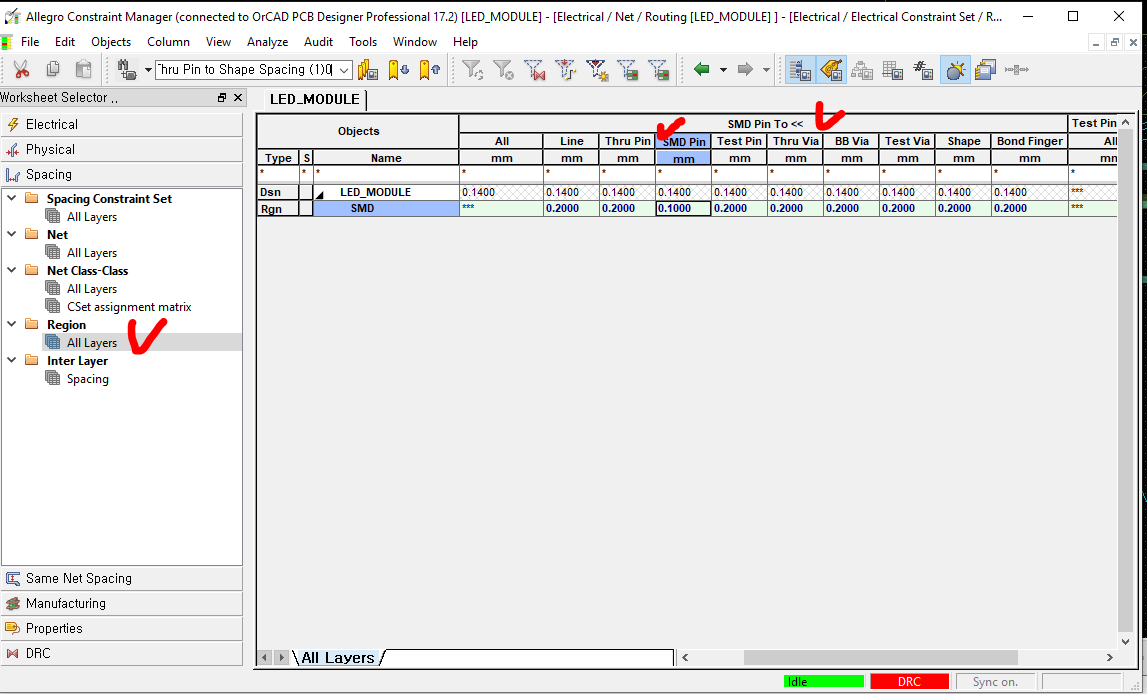
Electrical Constraint Set (Rule을 지정해주는 곳)
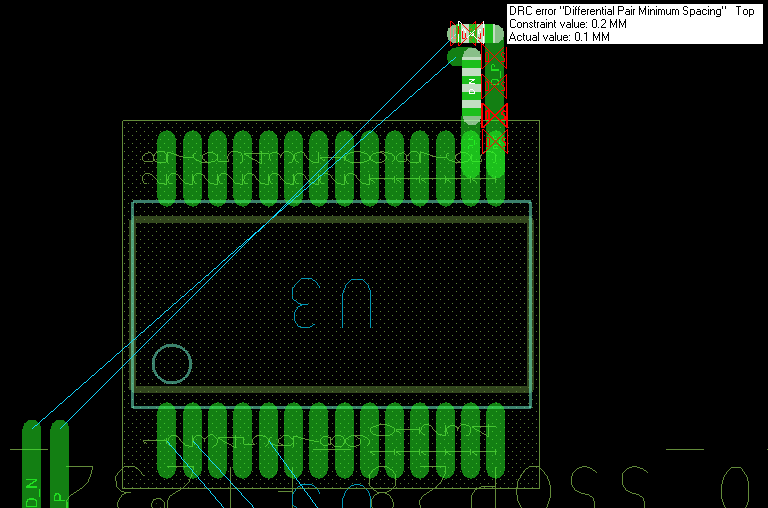
- Min Line Spacing (두 Diff Pair Route간의 거리 제한)
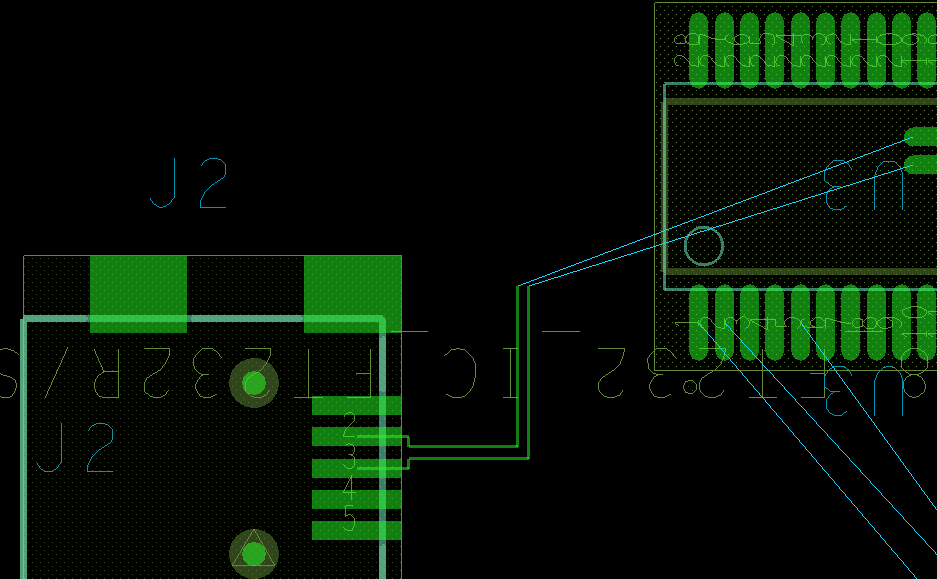
두 Route간의 사이 거리가 0.1mm 일때, 제한을 0.1mm로 하면 아래와 같이 오류가 없이 넘어간다.
사이 간격을 0.1 으로 제한 했을 때,
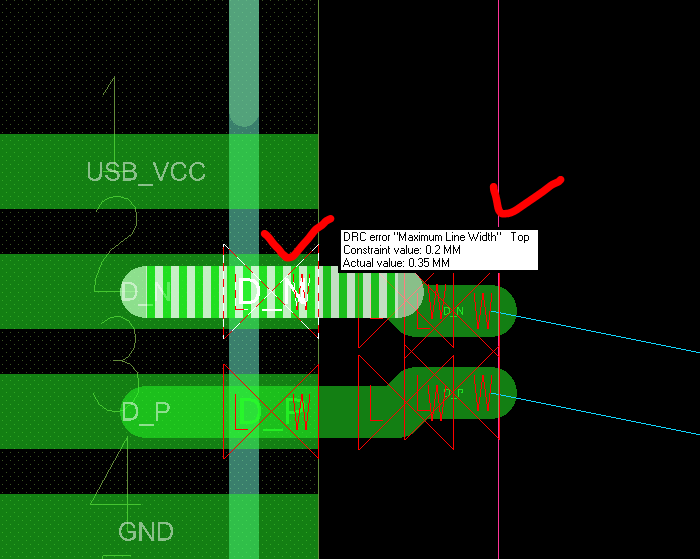
두 Route간의 사이 거리를 0.2mm로 할때, 아래와 같이 DRC에러가 발생한다. 0.2mm 이상 떨어져 있어야 하는데, Actual value는 0.1mm이기 때문이다.